前言
这个六足机器人是我在大四做的,是我大学本科生涯的最后一个个人项目。至于为什么我要做六足机器人,还要从高考完之后说起:当时刚考完的我一直想做一些有意思的事情,直到有一天我发现了一个叫
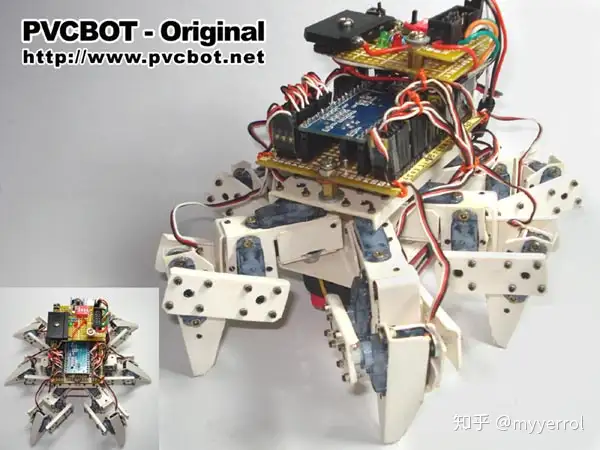
PVCBOT的网站,里面记录了很多如何使用PVC材料来制作简单机器人的教程,其中有一款叫做PVC六足机器昆虫(见下图)的机器人彻底震撼了我,当时看完教程之后我就下定决心也要做一个类似的六足机器人,于是我便从
懒猫侠前辈那里购买了六足机器人套件(目前应该已经绝版了),并打算按照提供的教程完成自己的六足机器人,但无奈当时的我所掌握的知识太少,什么单片机、
串口通信
经过大一那次失败之后,我决定暂时停止该项目的开发,转而先去学习那些有关
嵌入式开发
概述
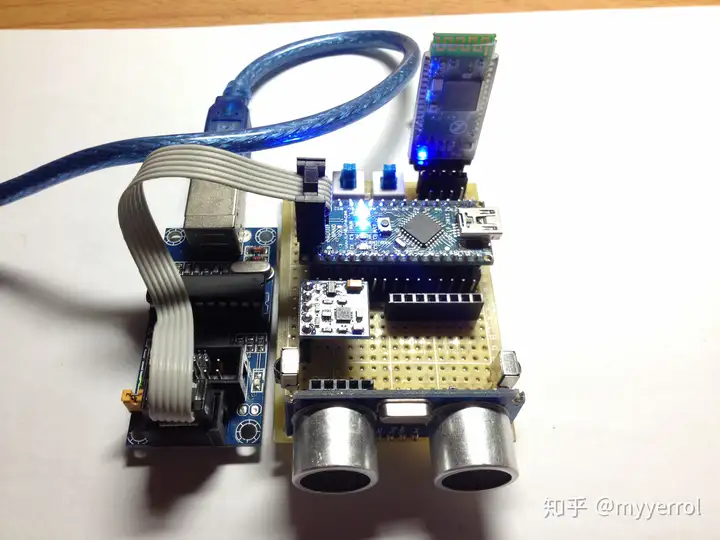
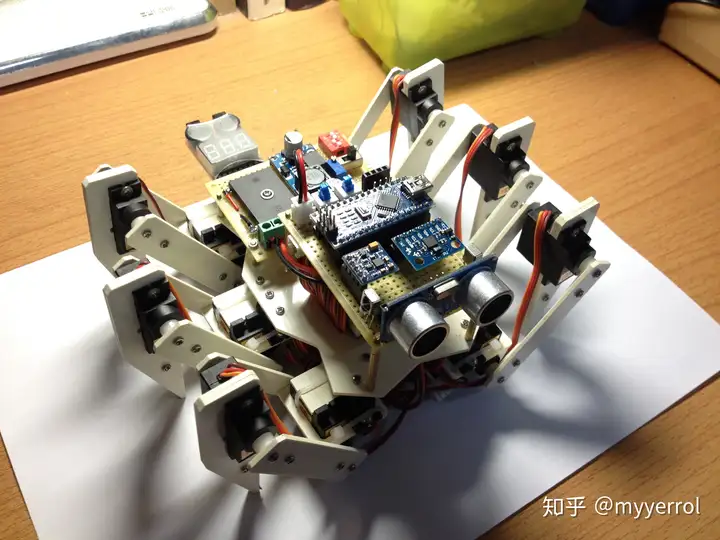
六足仿生机器人是一个拥有十八个关节自由度的迷你多足机器人,它可以实现红外遥控、超声波避障等基本功能。机器人的硬件核心为Arduino Nano,并采用串口通信的方式与24路舵机控制板进行数据交互,从而间接完成对所有舵机旋转角度的精确控制,最终使机器人能够以各种不同的步态进行移动。当然,这个机器人项目的软件依旧开源,具体代码可以从我的GitHub 仓库上获得。
制作
六足机器人的整个制作过程主要分为机械和电子两部分,其中机械部分我是根据懒猫侠在其博客上发布的 第五版六足肢体装配教程来完成所有拼装的,由于教程中每一步的图片都非常清楚,所以机械这部分没花费我太多的时间和精力。而电子部分则全部是我自己设计的,虽然原理难度不大,但是要根据机器人的机械结构来选择洞洞板的摆放位置并且要完成其上电子元件的布局和焊接工作确实也比较费功夫,而且有的时候如果处理的不好还要返工,不过所幸自己在焊电路前就已经规划好了,所以电路部分的制作也还算顺利。
在接下来的篇幅中,我会尽可能详细地讲解机器人制作过程中的一些具体步骤和细节,如果你对机器人的原理和最后的效果更感兴趣的话,可以跳过本小节直接阅读原理和效果章节。
机械
- 六足小腿
如下图所示,六足的小腿部分主要由两片PVC材质的肢体通过叠加而成,而关节部分则使用的是9G金属齿舵机,只要两个
自攻螺丝
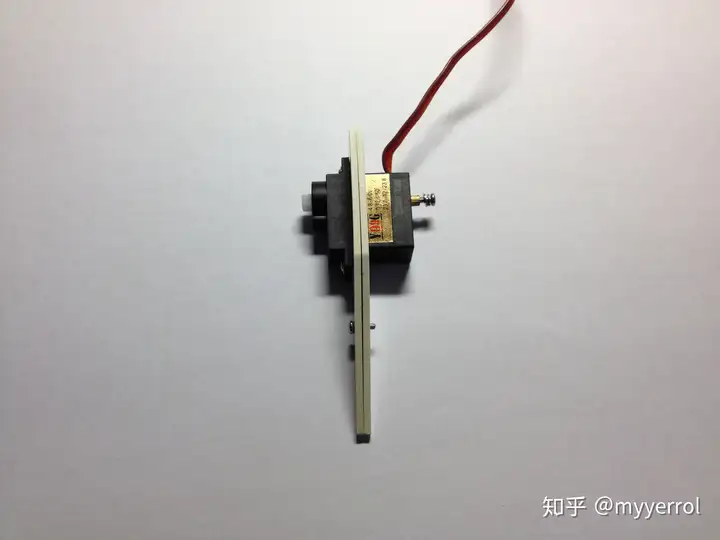
因为是六足机器人,所以同样结构的小腿要再做五个出来。注意:机器人的躯体每边有三个小腿,左右两两对称,所以在组装的时候肢体和舵机安装的位置是有讲究的,要保证结构对称且不能装反。
- 六足大腿
关节
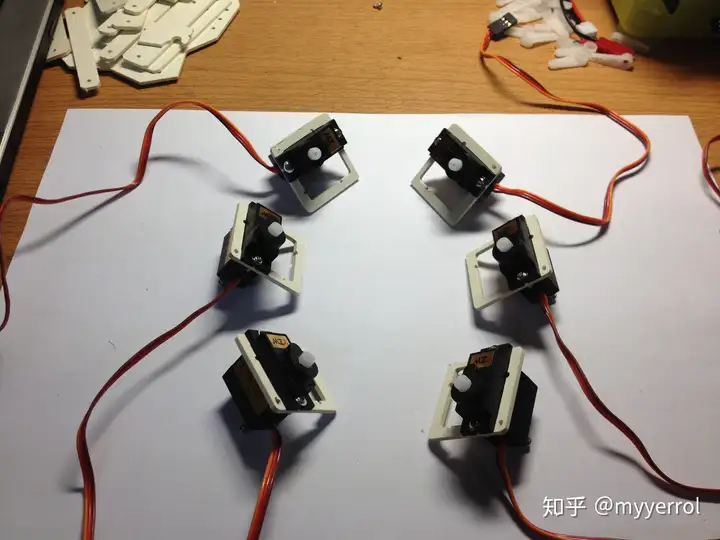
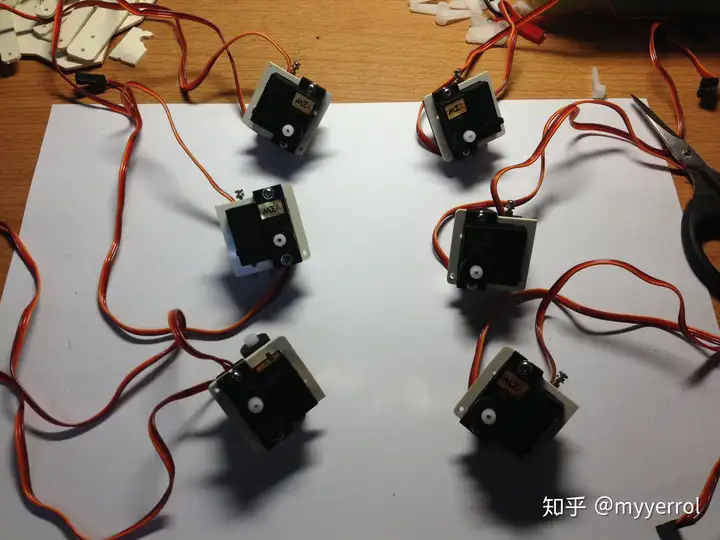
六足大腿的关节结构比之前介绍过的小腿关节要略微复杂一些,因为大腿的关节包含了机器人足体上下和前后两个维度的运动,所以需要两个舵机来实现。如下图所示,首先我们使用螺丝将一个舵机固定在方形的关节肢体里。

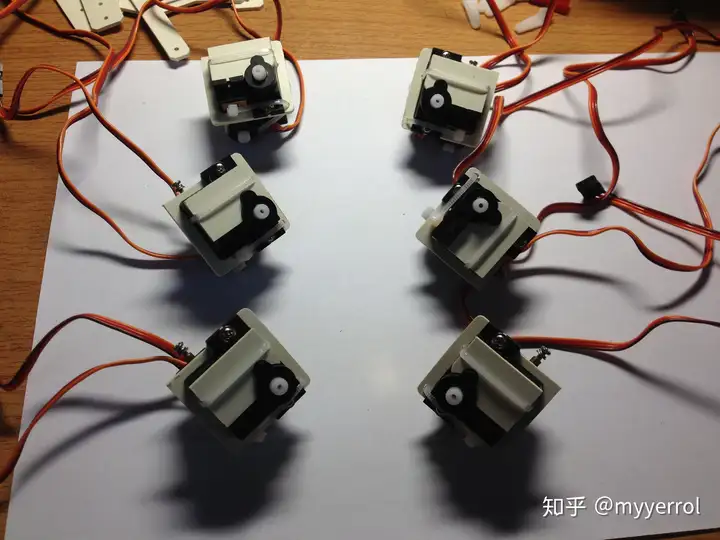
接着我们要重复以上的安装步骤再制作出六个类似的肢体结构。不过在制作的过程中也要注意机器人左右两侧各三个肢体结构要保持对称。
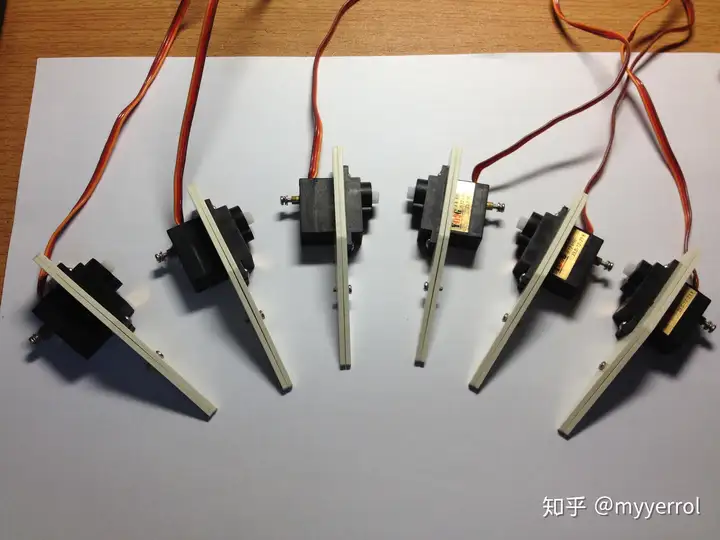
然后我们需要将六个舵机分别插入到之前预留好的肢体空槽里,并保证每组的两个舵机在位置上是互相垂直的,即下图中舵机圆形旋转轴的朝向要一前一上。
接下来安装六足大腿关节的固定片,即将固定片卡到下图中正面那个舵机的圆形旋转轴上。固定片,顾名思义是用来固定的,用在这里主要是防止关节处的两个舵机因足体的震动而彼此之间出现位置上的偏移。
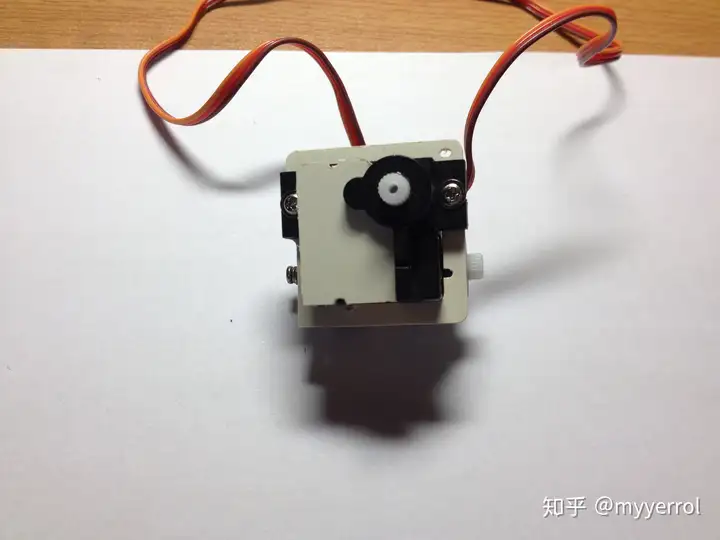
最后分别使用两条塑料扎带对每组关节进行进一步的加固,其中一条从固定片上方穿过,起到束紧固定片的作用,而另一条则穿过关节侧面的小孔对结构进行固定。
大腿
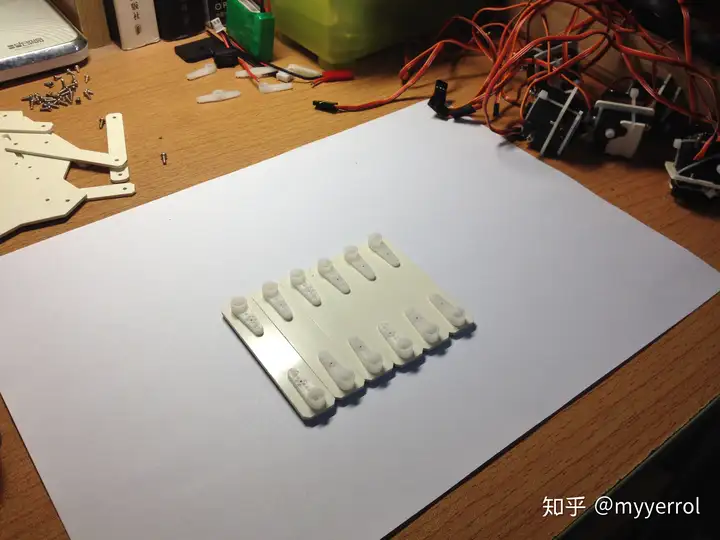
六足的大腿是由两个PVC材质的长方形连杆组成,从下图中可以很清楚地看到每个连杆的左右两侧均安装有配套的舵盘,它们的作用主要是用于连接六足的小腿关节和大腿关节。
- 六足足体
如下图所示,使用螺丝将之前已经制作好的六对小腿和大腿肢体对应连接在一起。虽然拧螺丝本身没什么难度,但是在哪个位置用螺丝来固定舵机还是有规定的:即舵机在被肢体连接固定之前要让其旋转轴回归到原始的中点位置上(旋转范围为0~180°的舵机,其中点位置为90°),这样做的目的是让所有的舵机都能够拥有最合适的运动范围,从而防止机器人在移动时出现足体运动不对称的情况。至于如何让舵机回归中点,一种办法是使用现成的舵机调试板,只要移动旋钮便可调节舵机的位置;另一种是编写Arduino程序,让舵机在上电后自动归中。我用的是第二种方法,感觉效果还不错。

接下来,我们要把六足的足体全部安装到其顶部躯体上。同理,在安装前要确保需要连接固定的舵机已经回归到中点位置,除此之外还要提前规定好躯体的哪一侧是机器人的头部,哪一端是机器人的尾部,不要在安装的时候把足体装反了。

如图所示,我们首先可以找一个稍微有点高度的物品将机器人顶部垫高,然后使用扎带依次将每个足体的三条舵机线捆绑起来,这样不仅看上去更加美观,便于之后的整理和连线,而且也可以有效阻止舵机线与运动中的足体发生缠绕甚至被扯断等情况的出现,毕竟自己大学在机器人基地的时候就曾亲身经历过电机线在机械臂移动的过程中被狠狠地扯断的悲剧。。。

最后,我们只需要把锂电池用扎带固定在底部躯体的尾部,然后将供电线和充电线分别引出,再把所有已经扎好的舵机线按照顺序塞到躯体当中,并用螺丝将顶部和底部两个躯体拧紧合二为一便大功告成了(由于这部分没有拍照,所以就用文字叙述了orz)。
作者:机器小子myyerrol,首发:知乎